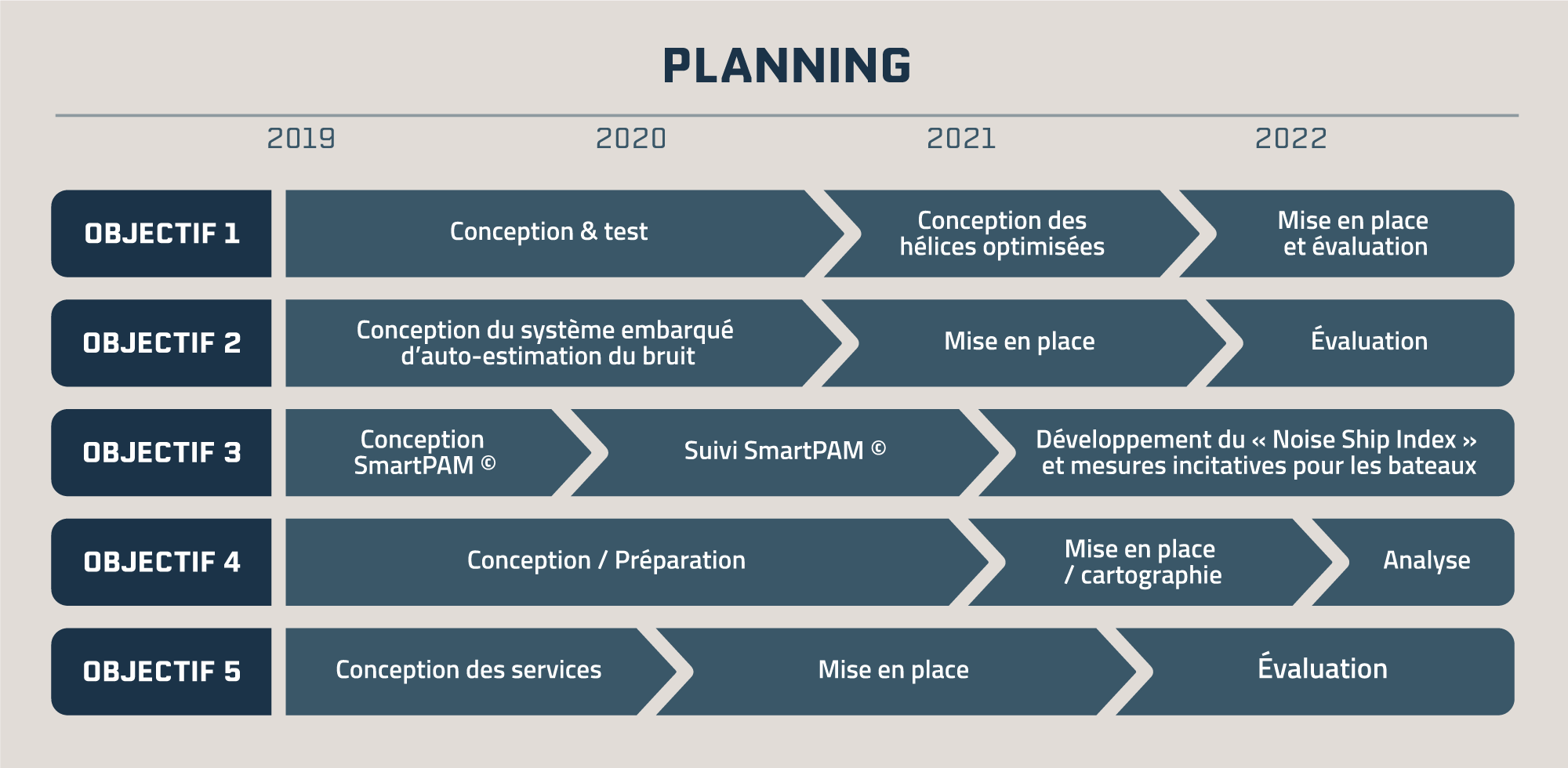
Objectifs
Objectif 1
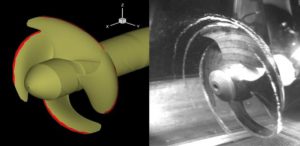
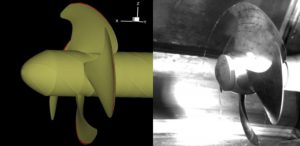
Démonstration sur deux bateaux de la possibilité de réduire le bruit rayonné via des propulseurs optimisés en rétrofit
Le bruit rayonné d’un navire est composé de trois éléments :
- Le bruit hydrodynamique : ce bruit généré par la circulation de l’eau est peu important ;
- Le bruit des machines : ce bruit est généré par la radiation de la coque généré par le mouvement des machines internes. Cet élément du bruit sous-marin rayonné est important ;
- Le bruit des hélices : Cet élément est la principale cause de bruit sous-marin rayonné pour les vaisseaux civils. Il est créé par plusieurs phénomènes mais sa composante principale est liée à la cavitation générée par les hélices.
L’objectif de PIAQUO est de réduire le bruit des hélices tout en maintenant un haut niveau de performance.
Une analyse et une étude d’optimisation seront réalisées sur deux vaisseaux : un de 28m et un grand ferry Ro-Ro. Cette étude permettra de définir 2 hélices tests, évaluées en tunnel.
Cette optimisation sera suivie du rétrofit réel des deux bateaux avec les hélices optimisées. La mesure du bruit rayonné sera réalisée avant et après le rétrofit des hélices sur les deux navires tests.
L’impact d’une généralisation de ce type d’hélice à l’échelle européenne fera également l’objet d’une étude.
Objectif 2
Démonstration d’un système d’auto-estimation en temps réel du niveau de bruit rayonné par un navire et d’auto-détection de sa cavitation
Compte tenu des réglementations futures, les navires devront pouvoir estimer leur bruit rayonné en temps réel afin de pouvoir l’adapter en modifiant leur vitesse et/ou leur route. Pour satisfaire ce besoin préliminaire à toute action, un système fournira au commandement une estimation en temps réel du bruit rayonné dans l’eau par le navire. Il permettra également à l’équipage de connaître le niveau de cavitation de ses hélices.
Ce système sera composé d’un réseau de capteurs (accéléromètres, tachymètres, capteurs start-stop…) et d’un modèle vibro-acoustique du navire.
Le programme d’étude définira l’architecture du système, les capteurs nécessaires, leur positionnement et le modèle numérique permettant de simuler le bruit rayonné.
Le modèle numérique sera ensuite calibré via des mesures réelles du bruit rayonné par le navire. Ce travail sera réalisé sur le grand ferry Ro-Ro précédemment cité.
Le projet permettra également de tester un système d’auto-détection de la cavitation donnant aux navires la possibilité d’auto-évaluer leurs performances grâce à un algorithme de traitement du signal utilisant les données des capteurs situés à l’arrière du navire.

Objectif 3
Mise en place et évaluation de mesures d’incitation aux démarches proactives de réduction des bruits rayonnés des navires en lien avec une base de données des bruits rayonnés réels des bateaux
Un système de mesures à long terme sera déployé pendant un an en utilisant la technologie de bouée en temps réel SmartPAM©.
Les niveaux de bruit rayonné provenant des navires seront automatiquement mesurés, post-traités et transmis pour alimenter une base de données des niveaux de bruit rayonné des navires.
Les sites candidats au déploiement de SmartPAM© sont au large de Marseille-Fos (France) ou de Gênes (Italie).
Le projet prévoit également l’élaboration, en lien avec les ports partenaires, d’un indice du bruit des navires (NSI) pour évaluer et encourager les améliorations apportées pour réduire le bruit des navires.
Les armateurs seront informés des niveaux de bruit rayonnés et de NSI de leurs navires et recevront des propositions de mesures.
Une politique d’incitation multi-leviers sera par ailleurs définie et testée par un grand port européen.

Objectif 4
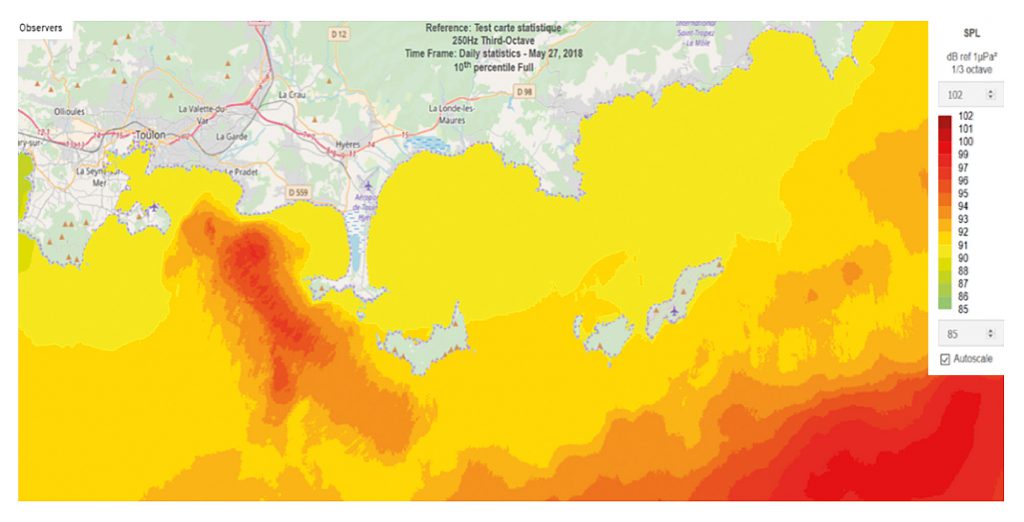
Mise en place et évaluation d’un système d’adaptation en temps réel du trafic maritime à l’état des écosystèmes maritimes en lien avec leur cartographie par acoustique passive
Dans le but d’évaluer la sensibilité de l’écosystème marin au bruit de la navigation sous-marine, nous réaliserons une cartographie dynamique de celle-ci.
Des démonstrations seront effectuées pendant deux ans en eaux littorales, dans deux AMP méditerranéennes (Parc National des Calanques et MPA Tavolara Punta Coda Cavallo), pour les poissons côtiers (maigre brun et mérou sombre).
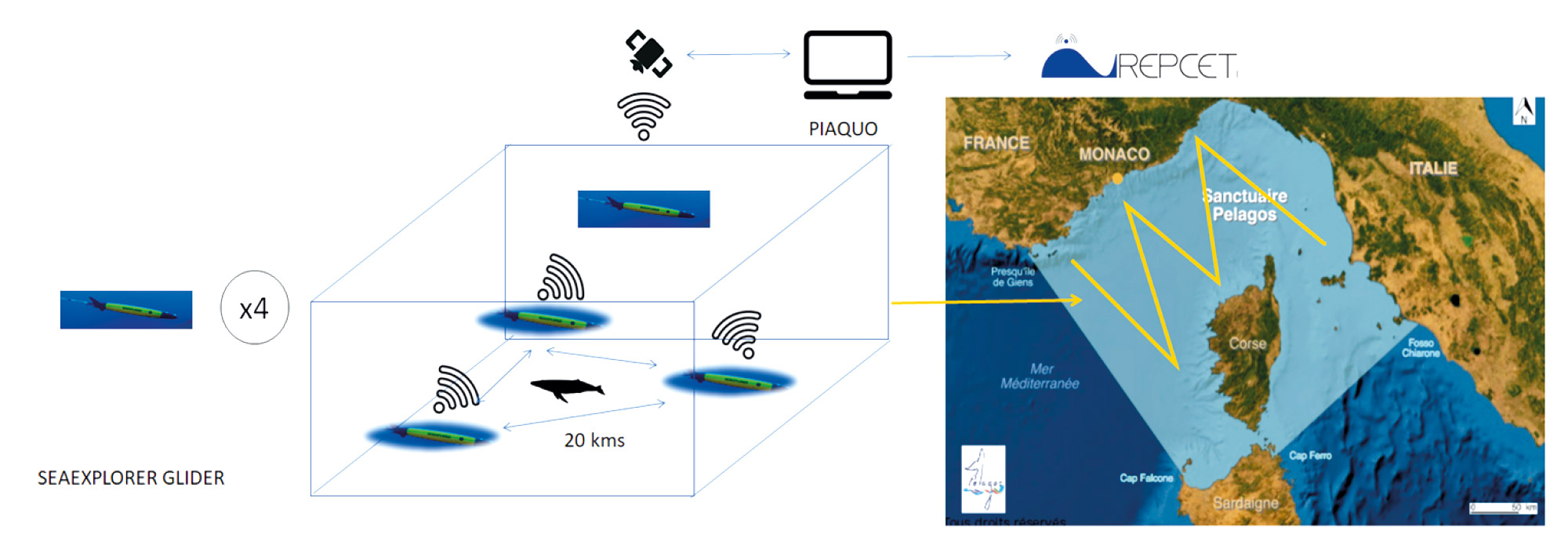
Nous réaliserons également des démonstration en offshore durant quatre mois, au Sanctuaire Pelagos, sur différents cétacés (rorqual commun, cachalot et pélagos).
Pour effectuer ces démonstrations, nous emploieront les systèmes de Bouées SmartPAM© connectées, des enregistreurs de données d’amarrage fixe et acoustique autonome à long terme ainsi qu’un réseau de quatre gliders avec charge utile acoustique.
La sensibilité au bruit sera évaluée et cartographier selon trois niveaux :
- D’abord, le niveau « biotique » : des bouées PAM© seront utilisées afin de cartographier la faune marine sonifère (quand, où, combien, pourquoi…) ;
- Le niveau 2 « anthropique » impliquera l’emploi des outils AIS, photographiques, et des bouées PAM© intelligentes et de simulation pour cartographier le bruit sous-marin des navires ;
- Enfin, le dernier niveau « de sensibilité » consistera en la combinaison des niveaux 1 et 2.
Grâce à un travail collaboratif des parties prenantes et des autorités environnementales, des incitations et mesures d’atténuation pourront alors être définies.
Objectif 5
Mise en place de services web innovants pour l’aide à la prise de décision des acteurs publics et privés
Les données issues de PIAQUO seront gérées et stockées à l’aide des technologies Big Data et Intelligence Artificielle.
Les services seront définis et mis en œuvre en collaboration avec les utilisateurs finaux. Ils comprendront :
- Une application web basée sur des cartes de l’écosystème (objectif 4), ainsi que sur la base de données du bruit des navires (objectif 3) pour informer les entités publiques de l’impact du trafic maritime par zones et périodes et pour avertir les capitaines/armateurs de l’impact de leur flotte/navire ;
- Des indicateurs de pression pour évaluer l’empreinte maritime pour chaque zone et chaque zone portuaire au niveau mondial ;
- Des indicateurs d’impact pour évaluer les impacts sur les écosystèmes.