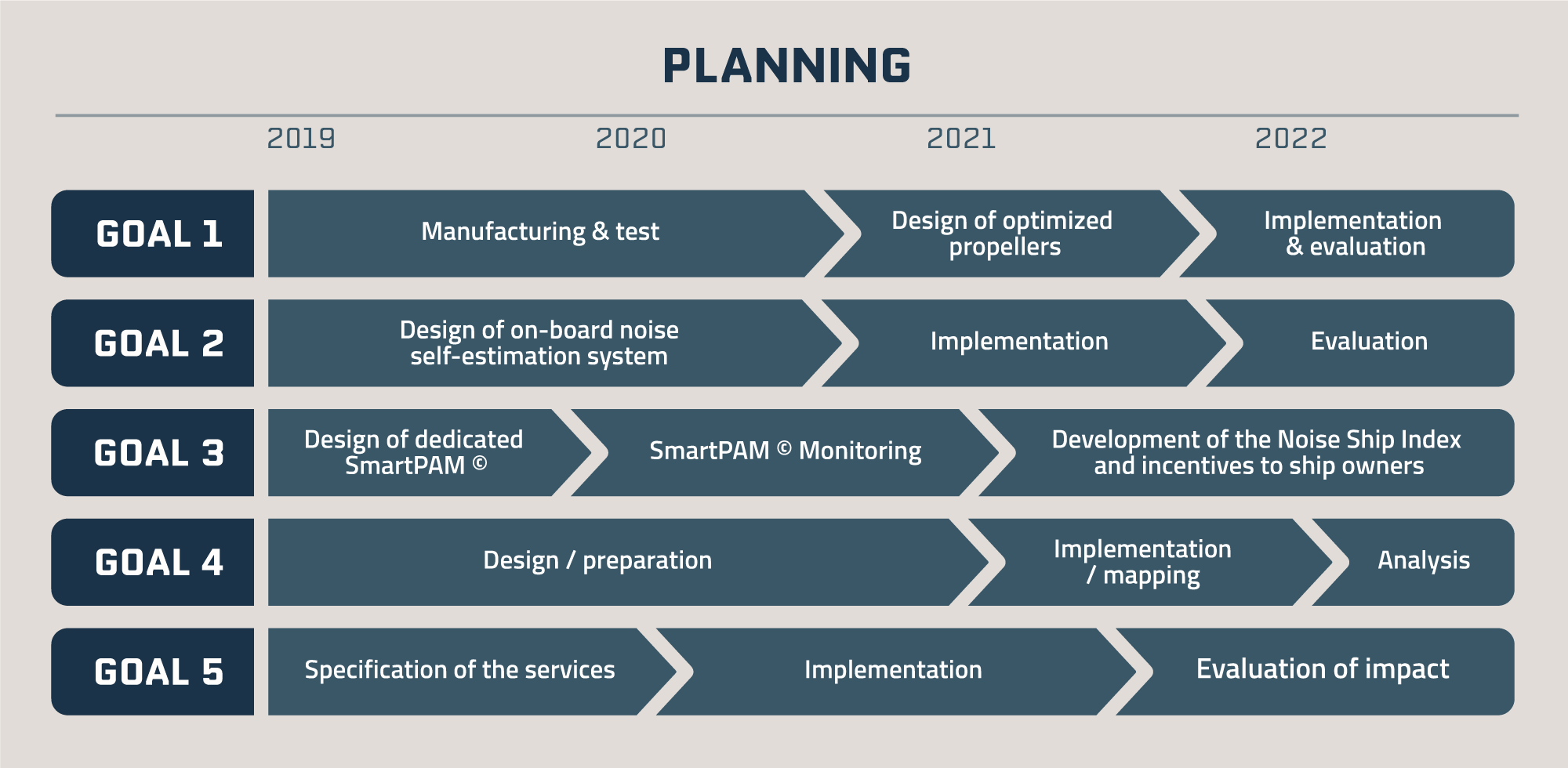
Goals
Goal 1
Demonstration on two boats of the possibility of underwater radiated noise reduction via optimized retrofit propellers
The radiated noise of a vessel is made of three components:
- The hydrodynamic noise: this noise coming from the water flow on the hull is not dominating;
- The machinery noise: this noise is generated by the radiation of the hull made by internal machines movements. This component of the radiated noise is important but is not the main one at the usual operating speed of civil vessels;
- The propeller noise: this component of the radiated noise is dominating for civil vessels. It is created by several phenomena but its main component is tied to the cavitation generated by the propellers.
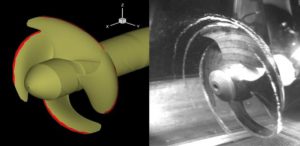
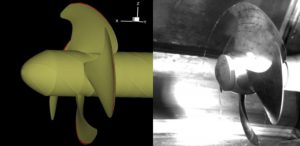
PIAQUO is willing to reduce the propellers’ noise of vessels while keeping a high performance.
An analysis will be conducted and an optimization study will be realized for 2 vessels: a 28m vessel and a large Ro-Ro ferry. This study will lead to the design of two test propellers that will be evaluated in tunnel.
This optimization will be followed by the actual retrofit of the two boats with the optimized propellers. The radiated noise will be measured before and after the retrofit of the propellers on the two experimental vessels.
Extension scenario at the European scale will also be estimated on this point.
Goal 2
Demonstration of a real-time self-estimation system of the noise level radiated by a ship and self-detection of its cavitation
Taking into account future regulations, vessels will have to be able to estimate their radiated noise in real-time in order to adapt it by modifying their speed and/or their path. To meet this prerequisite, a system will provide the command with a real-time estimate of the noise radiated into the water by the ship. It will also allow the crew to know the level of cavitation of their propellers.
This system will be made of a network of sensors (accelerometers, tachometers, start-stop sensors…) and a vibro-acoustics model of the ship.
The study program will define the architecture of the system, the necessary sensors, their positioning and the numerical model allowing to simulate the radiated noise.
The numerical model will then be calibrated using real measurements of the noise radiated by the ship. This work will be carried out on the aforementioned large Ro-Ro ferry.
The project will also test a system of self-detection of cavitation giving the possibility to vessels to self-evaluate their real-time performance on this point thanks to a signal processing algorithm using the sensors’ data located at the back of the vessel.

Goal 3
Establishment and evaluation of incentives for proactive approaches to reduce radiated noise from ships in connection with a database of actual radiated noise from ships
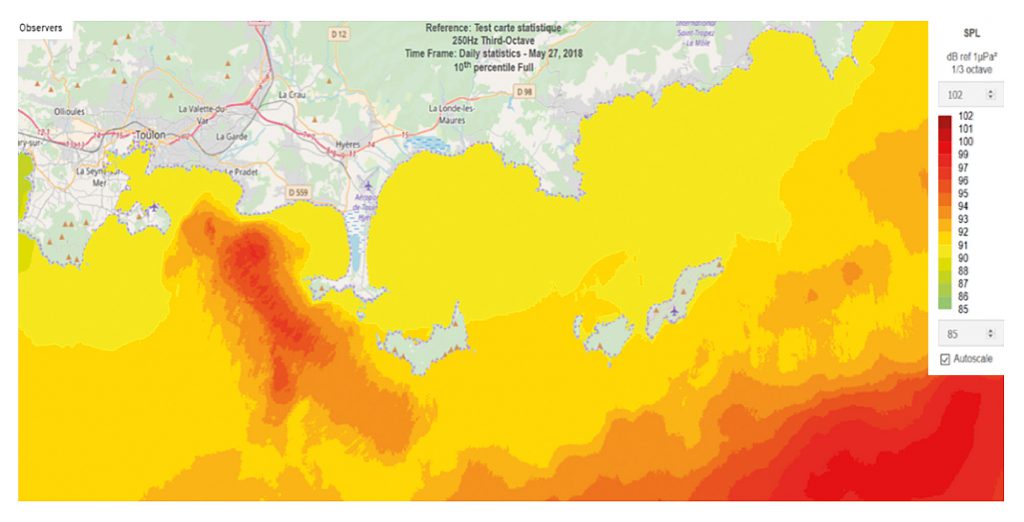
A long-term monitoring system will be deployed for one year by using the PAM© real-time buoy technology.
Levels of radiated noise from vessels will be automatically measured, post-processed and transmitted to populate a database of radiated noise levels of individual vessels. Candidate locations for the deployment of the PAM© buoy are offshore Marseille-Fos (France) or Genoa (Italy).
The project also plans the development, in collaboration with partner harbors, of a Noise Ship Index (NSI) to rate and encourage improvements made to reduce ship noise.
Ship-owners will be informed of their measured levels of radiated noise and NSI with advises for improvement.
A multi-lever incentive policy will also be defined and tested by a major European harbor.

Goal 4
Implementation and evaluation of a real-time adaptation system of maritime traffic to the state of maritime ecosystems in connection with their passive acoustic mapping
In order to measure the sensitivity of marine ecosystem to underwater shipping noise, we will create a dynamic mapping of it.
Demonstrations will be carried out for two years for nearshore waters, in two Mediterranean MPAs (Calanques National Park and MPA Tavolara Punta Coda Cavallo), for coastal fish (lean brown and dark grouper).
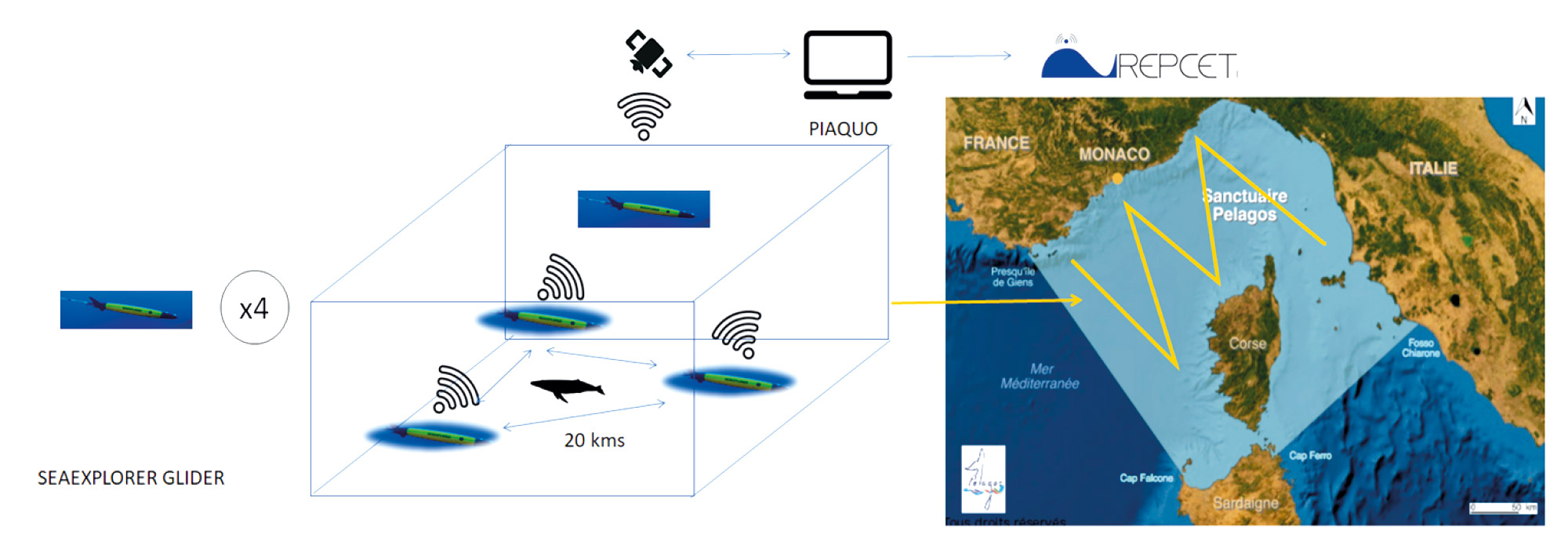
We will accomplish demonstrations at sea for four months, at the Pelagos Sanctuary, on different cetaceans (fin whale, sperm whale and pelagos).
To carry out these demonstrations, we will use connected SmartPAM© buoy systems, long-term autonomous fixed mooring and acoustics data logger, as well as a network of four gliders with acoustic payload.
Noise sensitivity will be observed and mapped according to three layers:
- First, the “biotic” layer: intelligent PAM© buoy will be used to map the soniferous marine fauna (when, where, how much, why …);
- The “anthropic” layer 2 will involve the use of AIS, photographic, intelligent PAM© buoy and simulation tools to map underwater noise from ships;
- Finally, the “sensitivity” layer will consist of the combination of layers 1 and 2.
Thanks to a collaborative work of stakeholders and environmental authorities, incentives and mitigation measures can then be defined, in order to decrease the adverse effects of shipping noise on marine ecosystems
Goal 5
Implementation of innovative web services to assist decision-making of public and private actors
PIAQUO monitoring will be managed and stored using Big Data and Artificial Intelligence technologies.
Services will be defined and implemented in collaboration with end users. They will include:
- A web application based on ecosystem maps (goal 4) and on the ship noise database (objective 3) to inform public entities of the impact of maritime traffic by zones and periods and to warn captains / owners of the impact of their fleet / ship.
- Pressure indicators to evaluate global shipping footprint for each area and each harbor area.
- Impact indicators to evaluate impacts on ecosystems.